

科研进展
重庆研究院在具身智能基础模型研究中取得系列进展
时间:2026-05-12编辑:大数据与无人系统研究中心
具身智能是人工智能从数字空间走向物理世界的重要形态,是推动机器人从“程序化执行”迈向“自主理解与行动”的关键支撑。面向智能制造、智慧农业、医疗辅助、家庭服务和复杂环境作业等现实需求,开展具身智能基础模型与机器人自主决策研究,对于提升机器人自主作业能力、发展新质生产力具有重要意义。《2026年国务院政府工作报告》明确提出将“具身智能”作为我国前瞻布局的未来产业之一。
机器人如何在长时程任务中始终保持对目标的理解和执行一致性,是当前具身智能面临的核心基础问题之一。现有“视觉—语言—动作”模型在短任务中已展现出较好能力,但在复杂连续任务中,机器人容易受到局部观测、环境扰动和动作累积误差影响,出现阶段性动作合理但整体目标偏离的现象,制约其在开放物理环境中的稳定执行和泛化应用。
针对这一问题,重庆研究院尚明生研究员团队提出面向长程任务的按需搜索方法。该方法将任务执行中的目标偏移重新理解为采样过程中的系统性误差,以执行过程中的不确定性变化为线索,识别可能导致目标偏移的关键节点。当机器人面对相似物体、遮挡环境、空间关系歧义和多步骤衔接等情形时,模型容易进入决策不稳定状态。针对这类关键不确定节点,研究引入轨迹重采样与一致性校验机制,在全局目标约束下对候选动作序列进行筛选,从而降低局部最优决策造成的长程任务偏移风险,提升机器人在复杂连续任务中的执行稳定性。
实验结果表明,该方法在多个长程机器人任务基准上取得良好效果。在 LIBERO-Long 基准上,方法平均成功率达到 97.6%,高于斯坦福大学、加州大学伯克利分校和 NVIDIA Research 提出的 RoboMonkey 方法;以具身智能头部企业 Physical Intelligence 提出的π0模型为基础模型进行验证时,该方法在 RoboTwin 1.0 基准上将任务成功率提高 15.2%;在 RoboTwin 2.0 基准上,方法较清华大学提出的 RDT 模型提高 31.6%,并优于同期代表性测试时扩展方法 TACO。
相关研究工作已被国际学术会议ICML 2026、ACL 2026 和国际期刊ESWA等收录。相关研究获得中国科学院先导项目、国家自然科学基金等项目的支持。
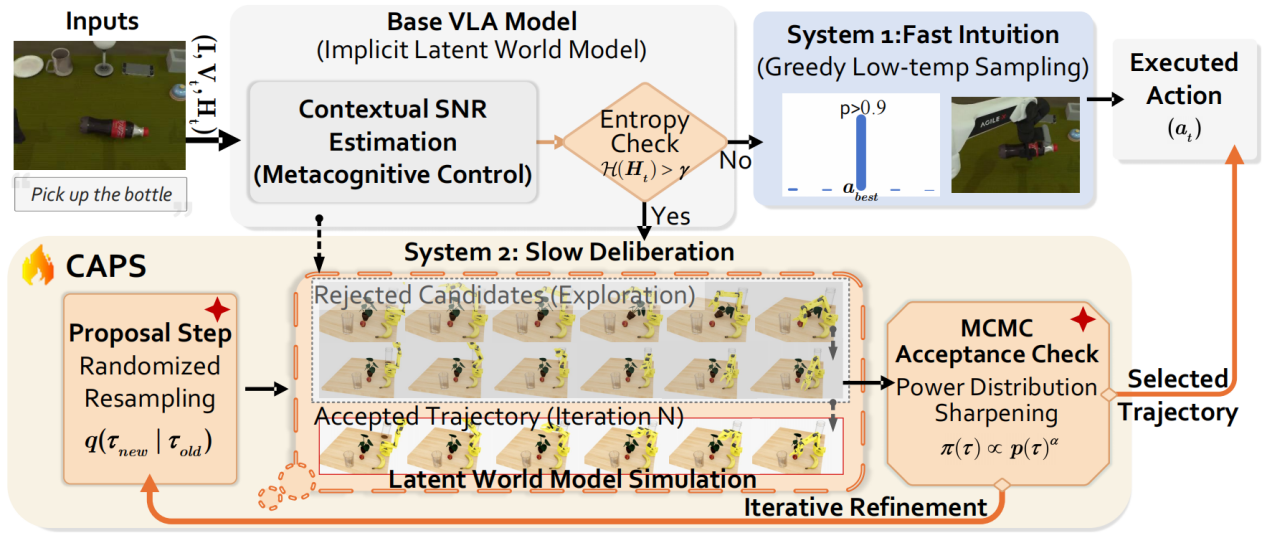
图 长程任务执行中的按需搜索机制
相关论文链接:
https://www.sciencedirect.com/science/article/pii/S0957417426015873
https://arxiv.org/abs/2605.08612
https://arxiv.org/abs/2605.08799
https://arxiv.org/abs/2605.09537
中国科学院重庆绿色智能技术研究院 版权所有京ICP备05002857号渝公网安备50010943035号

















